build structure of read-the-docs
7
doc/source/api.rst
Normal file
@@ -0,0 +1,7 @@
|
||||
.. _api_reference:
|
||||
|
||||
=============
|
||||
API reference
|
||||
=============
|
||||
|
||||
|
||||
124
doc/source/conf.py
Normal file
@@ -0,0 +1,124 @@
|
||||
# Configuration file for the Sphinx documentation builder.
|
||||
#
|
||||
# For the full list of built-in configuration values, see the documentation:
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html
|
||||
|
||||
# -- Project information -----------------------------------------------------
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html#project-information
|
||||
|
||||
# -- General configuration ---------------------------------------------------
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html#general-configuration
|
||||
|
||||
extensions = [
|
||||
'sphinx.ext.autodoc',
|
||||
'sphinx.ext.autosummary',
|
||||
'sphinx.ext.githubpages',
|
||||
'sphinx.ext.intersphinx',
|
||||
'sphinx.ext.mathjax',
|
||||
'sphinx.ext.doctest',
|
||||
'sphinx.ext.todo',
|
||||
'sphinx.ext.viewcode',
|
||||
'sphinx_panels',
|
||||
'IPython.sphinxext.ipython_directive',
|
||||
'IPython.sphinxext.ipython_console_highlighting',
|
||||
'matplotlib.sphinxext.plot_directive',
|
||||
'numpydoc',
|
||||
'sphinx_copybutton',
|
||||
'myst_nb',
|
||||
]
|
||||
|
||||
templates_path = ['_templates']
|
||||
# The suffix(es) of source filenames.
|
||||
# You can specify multiple suffix as a list of string:
|
||||
#
|
||||
# source_suffix = ['.rst', '.md']
|
||||
source_suffix = '.rst'
|
||||
|
||||
# The master toctree document.
|
||||
master_doc = 'index'
|
||||
|
||||
exclude_patterns = []
|
||||
|
||||
# The language for content autogenerated by Sphinx. Refer to documentation
|
||||
# for a list of supported languages.
|
||||
#
|
||||
# This is also used if you do content translation via gettext catalogs.
|
||||
# Usually you set "language" from the command line for these cases.
|
||||
language = "en"
|
||||
|
||||
# General information about the project.
|
||||
project = 'AMS'
|
||||
copyright = '2023, Jinning Wang'
|
||||
author = 'Jinning Wang'
|
||||
release = '0.4'
|
||||
|
||||
# The name of the Pygments (syntax highlighting) style to use.
|
||||
pygments_style = 'sphinx'
|
||||
|
||||
# If true, `todo` and `todoList` produce output, else they produce nothing.
|
||||
todo_include_todos = False
|
||||
|
||||
# -- Options for HTML output -------------------------------------------------
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html#options-for-html-output
|
||||
|
||||
html_theme = 'pydata_sphinx_theme'
|
||||
|
||||
# Theme options are theme-specific and customize the look and feel of a theme
|
||||
# further. For a list of options available for each theme, see the
|
||||
# documentation.
|
||||
#
|
||||
html_theme_options = {
|
||||
"use_edit_page_button": True,
|
||||
}
|
||||
|
||||
html_context = {
|
||||
"github_url": "https://github.com",
|
||||
"github_user": "jinningwang",
|
||||
"github_repo": "ams",
|
||||
"github_version": "master",
|
||||
"doc_path": "docs/source",
|
||||
}
|
||||
|
||||
# Add any paths that contain custom static files (such as style sheets) here,
|
||||
# relative to this directory. They are copied after the builtin static files,
|
||||
# so a file named "default.css" will overwrite the builtin "default.css".
|
||||
html_static_path = ['_static']
|
||||
|
||||
# -- Options for HTMLHelp output ------------------------------------------
|
||||
|
||||
# Output file base name for HTML help builder.
|
||||
htmlhelp_basename = 'ams'
|
||||
|
||||
# -- Options for Texinfo output -------------------------------------------
|
||||
|
||||
# Grouping the document tree into Texinfo files. List of tuples
|
||||
# (source start file, target name, title, author,
|
||||
# dir menu entry, description, category)
|
||||
# texinfo_documents = [
|
||||
# (master_doc, 'andes', 'ANDES Manual',
|
||||
# author, 'andes', 'Python Software for Symbolic Power System Modeling and Numerical Analysis',
|
||||
# 'Miscellaneous'),
|
||||
# ]
|
||||
|
||||
|
||||
# Example configuration for intersphinx: refer to the Python standard library.
|
||||
intersphinx_mapping = {
|
||||
'python': ('https://docs.python.org/3/', None),
|
||||
'numpy': ('https://docs.scipy.org/doc/numpy/', None),
|
||||
'scipy': ('https://docs.scipy.org/doc/scipy/reference/', None),
|
||||
'pandas': ('https://pandas.pydata.org/pandas-docs/stable', None),
|
||||
'matplotlib': ('https://matplotlib.org', None),
|
||||
}
|
||||
|
||||
# Favorite icon
|
||||
html_favicon = 'images/curent.ico'
|
||||
|
||||
# Disable smartquotes to display double dashes correctly
|
||||
smartquotes = False
|
||||
|
||||
# import and execute model reference generation script
|
||||
exec(open("genroutineref.py").read())
|
||||
|
||||
# sphinx-panels shouldn't add bootstrap css since the pydata-sphinx-theme
|
||||
# already loads it
|
||||
panels_add_bootstrap_css = False
|
||||
4
doc/source/examples/index.rst
Normal file
@@ -0,0 +1,4 @@
|
||||
.. _scripting_examples:
|
||||
|
||||
Examples
|
||||
========
|
||||
3
doc/source/genroutineref.py
Normal file
@@ -0,0 +1,3 @@
|
||||
"""
|
||||
This file is used to generate reStructuredText tables for Routine references.
|
||||
"""
|
||||
21
doc/source/getting_started/index.rst
Normal file
@@ -0,0 +1,21 @@
|
||||
|
||||
.. raw:: html
|
||||
|
||||
<embed>
|
||||
<h1 style="letter-spacing: 0.4em; font-size: 2.5em !important;
|
||||
margin-bottom: 0; padding-bottom: 0"> AMS </h1>
|
||||
|
||||
<p style="color: #00746F; font-variant: small-caps; font-weight: bold;
|
||||
margin-bottom: 2em">
|
||||
Python Library for Power System Dispatch Modeling and Dispatch-Dynamic Co-Simulation</p>
|
||||
</embed>
|
||||
|
||||
.. _getting-started:
|
||||
|
||||
===============
|
||||
Getting started
|
||||
===============
|
||||
|
||||
.. toctree::
|
||||
:maxdepth: 3
|
||||
:hidden:
|
||||
BIN
doc/source/images/curent.ico
Normal file
|
After Width: | Height: | Size: 36 KiB |
106
doc/source/index.rst
Normal file
@@ -0,0 +1,106 @@
|
||||
.. AMS documentation master file, created by
|
||||
sphinx-quickstart on Thu Jan 26 15:32:32 2023.
|
||||
You can adapt this file completely to your liking, but it should at least
|
||||
contain the root `toctree` directive.
|
||||
|
||||
==================
|
||||
AMS documentation
|
||||
==================
|
||||
**Useful Links**: `Source Repository`_ | `Report Issues`_ | `Q&A`_
|
||||
|
||||
.. _`Source Repository`: https://github.com/jinningwang/ams
|
||||
.. _`Report Issues`: https://github.com/jinningwang/ams/issues
|
||||
.. _`Q&A`: https://github.com/jinningwang/ams/discussions
|
||||
.. _`LTB Repository`: https://github.com/CURENT/ltb2
|
||||
|
||||
AMS is still under DEVELOPMENT, stay tuned!
|
||||
|
||||
AMS is an open-source packages for dispatch modeling and co-simulation with dynanic.
|
||||
|
||||
AMS is the dispatch simulation engine for the CURENT Largescale Testbed (LTB).
|
||||
More information about CURENT LTB can be found at the `LTB Repository`_.
|
||||
|
||||
.. panels::
|
||||
:card: + intro-card text-center
|
||||
:column: col-lg-6 col-md-6 col-sm-6 col-xs-12 d-flex
|
||||
|
||||
---
|
||||
|
||||
Getting started
|
||||
^^^^^^^^^^^^^^^
|
||||
|
||||
New to AMS? Check out the getting started guides.
|
||||
|
||||
+++
|
||||
|
||||
.. link-button:: getting-started
|
||||
:type: ref
|
||||
:text: To the getting started guides
|
||||
:classes: btn-block btn-secondary stretched-link
|
||||
|
||||
---
|
||||
|
||||
Examples
|
||||
^^^^^^^^
|
||||
|
||||
The examples of using AMS for power system dispatch study.
|
||||
|
||||
+++
|
||||
|
||||
.. link-button:: scripting_examples
|
||||
:type: ref
|
||||
:text: To the examples
|
||||
:classes: btn-block btn-secondary stretched-link
|
||||
|
||||
---
|
||||
|
||||
Model development guide
|
||||
^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
New dispatch modeling in AMS.
|
||||
|
||||
+++
|
||||
|
||||
.. link-button:: development
|
||||
:type: ref
|
||||
:text: To the development guide
|
||||
:classes: btn-block btn-secondary stretched-link
|
||||
---
|
||||
|
||||
API reference
|
||||
^^^^^^^^^^^^^
|
||||
|
||||
The API reference of AMS.
|
||||
|
||||
+++
|
||||
|
||||
.. link-button:: api_reference
|
||||
:type: ref
|
||||
:text: To the API reference
|
||||
:classes: btn-block btn-secondary stretched-link
|
||||
|
||||
---
|
||||
:column: col-12 p-3
|
||||
|
||||
Using AMS for Research?
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
Please cite our paper [Cui2021]_ if AMS is used in your research for
|
||||
publication.
|
||||
|
||||
|
||||
.. [Cui2021] H. Cui, F. Li and K. Tomsovic, "Hybrid Symbolic-Numeric Framework
|
||||
for Power System Modeling and Analysis," in IEEE Transactions on Power
|
||||
Systems, vol. 36, no. 2, pp. 1373-1384, March 2021, doi:
|
||||
10.1109/TPWRS.2020.3017019.
|
||||
|
||||
|
||||
.. toctree::
|
||||
:maxdepth: 3
|
||||
:caption: AMS Manual
|
||||
:hidden:
|
||||
|
||||
getting_started/index
|
||||
examples/index
|
||||
modeling/index
|
||||
release-notes
|
||||
api
|
||||
7
doc/source/modeling/index.rst
Normal file
@@ -0,0 +1,7 @@
|
||||
.. _development:
|
||||
|
||||
===========
|
||||
Development
|
||||
===========
|
||||
|
||||
Modeling guide for AMS.
|
||||
20
doc/source/old/about.md
Normal file
@@ -0,0 +1,20 @@
|
||||
# About
|
||||
|
||||
### Contributors
|
||||
* Rui Yao, Argonne National Laboratory <<ryao@anl.gov>>
|
||||
* Feng Qiu, Argonne National Laboratory <<fqiu@anl.gov>>
|
||||
* Kai Sun, University of Tennessee, Knoxville <<kaisun@utk.edu>>
|
||||
* Jianzhe Liu, Argonne National Laboratory <<jianzhe.liu@ieee.org>>
|
||||
|
||||
### Acknowledgement
|
||||
This work is supported by the Laboratory Directed Research and Development (LDRD) program of Argonne National Laboratory, provided by the U.S. Department of Energy Office of Science under Contract No. DE-AC02-06CH11357, and the U.S. Department of Energy Office of Electricity, Advanced Grid Modeling program under Grant DE-OE0000875.
|
||||
|
||||
### Publications
|
||||
* Rui Yao, Kai Sun, Feng Qiu, “Vectorized Efficient Computation of Padé Approximation for Semi-Analytical Simulation of Large-Scale Power Systems,” IEEE Transactions on Power Systems, 34 (5), 3957-3959, 2019.
|
||||
* Rui Yao, Yang Liu, Kai Sun, Feng Qiu, Jianhui Wang,"Efficient and Robust Dynamic Simulation of Power Systems with Holomorphic Embedding", IEEE Transactions on Power Systems, 35 (2), 938 - 949, 2020.
|
||||
* Rui Yao, Feng Qiu, "Novel AC Distribution Factor for Efficient Outage Analysis", IEEE Transactions on Power Systems, 35 (6), 4960-4963, 2020.
|
||||
* Xin Xu, Rui Yao, Kai Sun, Feng Qiu, "A Semi-Analytical Solution Approach for Solving Constant-Coefficient First-Order Partial Differential Equations", IEEE Control Systems Letters, 6, 704-709, 2021.
|
||||
* Rui Yao, Feng Qiu, Kai Sun, “Contingency Analysis Based on Partitioned and Parallel Holomorphic Embedding”, IEEE Transactions on Power Systems, in press.
|
||||
|
||||
### License
|
||||
This software is under BSD license. Please refer to LICENSE.md for details.
|
||||
439
doc/source/old/advanced_usage.md
Normal file
@@ -0,0 +1,439 @@
|
||||
# Advanced Usage
|
||||
|
||||
### 1. Customize analysis with settings file/struct
|
||||
PowerSAS.m lets you customize your simulation by providing a simulation settings interface to specify the events and scenarios to be analyzed. To use the customized simulation, call the `runPowerSAS` function as follows:
|
||||
```Matlab
|
||||
res=runPowerSAS('dyn',data,options,settings,snapshot)
|
||||
```
|
||||
Details are explained as follows:
|
||||
#### 1.1 Settings file
|
||||
The input argument `settings` can be a string specifying the settings file name, or a struct containing all the simulation settings.
|
||||
|
||||
When `settings` is a string, it should be a valid file name of an .m script file containing the settings. Some examples of the settings files can be found in the directory `/data`. The settings file should have the following variables:
|
||||
|
||||
* `eventList`: A gross list of events. ([more details](#variable-eventlist))
|
||||
* `bsBus`: (for black start simulation only) Black start bus information. ([more details](#variable-bsbus))
|
||||
* `bsSyn`: (for black start simulation only) Generator information on black start bus. ([more details](#variable-bssyn))
|
||||
* `bsInd`: (for black start simulation only) Inductin motor on black start bus. ([more details](#variable-bsind))
|
||||
* `Efstd`: Excitation potential of synchronous generators. ([more details](#variable-efstd))
|
||||
* `evtLine`: List of line addition/outage events. ([more details](#variables-evtline-and-evtlinespec))
|
||||
* `evtLineSpec`: Specifications of line addition/outage events. ([more details](#variables-evtline-and-evtlinespec))
|
||||
* `evtZip`: List of static load addition/shedding events. ([more details](#variables-evtzip-evtzipspec-and-evtzipspec2))
|
||||
* `evtZipSpec`: Specifications of static load addition/shedding events. ([more details](#variables-evtzip-evtzipspec-and-evtzipspec2))
|
||||
* `evtZipSpec2`: Alternative specifications of static load addition/shedding events. ([more details](#variables-evtzip-evtzipspec-and-evtzipspec2))
|
||||
* `evtInd`: List of induction motor addition/outage events. ([more details](#variables-evtind-and-evtindspec))
|
||||
* `evtIndSpec`: Specifications of induction motor addition/outage events. ([more details](#variables-evtind-and-evtindspec))
|
||||
* `evtSyn`: List of synchronous generator addition/outage events. ([more details](#variables-evtsyn-and-evtsynspec))
|
||||
* `evtSynSpec`: Specifications of synchronous generator addition/outage events. ([more details](#variables-evtsyn-and-evtsynspec))
|
||||
* `evtFault`: List of fault occurrence/clearing events. ([more details](#variables-evtfault-and-evtfaultspec))
|
||||
* `evtFaultSpec`: Specifications of fault occurrence/clearning events. ([more details](#variables-evtfault-and-evtfaultspec))
|
||||
* `evtDyn`: List of dynamic ramping events. ([more details](#variable-evtdyn))
|
||||
* `evtDynPQ`: Specifications of PQ bus ramping. ([more details](#variable-evtdynpq))
|
||||
* `evtDynPV`: Specifications of PV bus ramping. ([more details](#variable-evtdynpv))
|
||||
* `evtDynInd`: Specifications of induction motor mechanical load ramping. ([more details](#variable-evtdynind))
|
||||
* `evtDynZip`: Specifications of ZIP load ramping. ([more details](#variable-evtdynzip))
|
||||
* `evtDynSh`: Specifications of shunt compensator ramping. ([more details](#variable-evtdynsh))
|
||||
* `evtDynZipRamp`: Alternative specifications of ZIP load ramping. ([more details](#variable-evtdynramp))
|
||||
* `evtDynTmech`: Specifications of generator mechanical torque ramping. ([more details](#variable-evtdyntmech))
|
||||
* `evtDynPm`: Specifications of generator input active power ramping. ([more details](#variable-evtdynpm))
|
||||
* `evtDynEf`: Specifications of generator excitation potential ramping. ([more details](#variable-evtdynef))
|
||||
* `evtDynVref`: Specifications of exciter reference voltage ramping. ([more details](#variable-evtdynvref))
|
||||
* `evtDynEq1`: Specifications of generator transient excitation potential ramping. ([more details](#variable-evtdyneq1))
|
||||
|
||||
#### 1.2 Settings struct
|
||||
Alternatively, the `settings` can be a struct containing all the previous variables as its fields.
|
||||
|
||||
|
||||
#### Example 1: Transient stability analysis (TSA) using settings file
|
||||
In this example, we want to perform transient stability analysis on 2383-bus system. Here is the scenario of the TSA:
|
||||
* The total simulation period is 10 seconds.
|
||||
* At 0.5 s, apply faults on the starting terminals of lines 74 and 114, the fault resistance is 0.0 and the reactance is 0.02. At 0.75 s, clear the faults.
|
||||
* At 1.5 s, apply fault on the starting terminal of line 1674, the fault resistance is 0.0 and the reactance is 0.1. At 1.95 s, clear the faults.
|
||||
|
||||
The settings file for this simulation is shown below. Other variables irrelevant to the fault events are omitted here for the sake of clarity.
|
||||
```Matlab
|
||||
eventList=[...
|
||||
1 0.0000 0.0000 0 1 0.0 0.0000
|
||||
1.1 0.5000 0.0000 6 1 0.0 0.0000
|
||||
1.2 0.7500 0.0000 6 2 0.0 0.0000
|
||||
1.3 1.5000 0.0000 6 3 0.0 0.0000
|
||||
1.4 1.9500 0.0000 6 4 0.0 0.0000
|
||||
3 10.00 0.0000 99 0 0.0 0.0000
|
||||
];
|
||||
|
||||
% Fault event data
|
||||
evtFault=[...
|
||||
1 1 2
|
||||
2 3 4
|
||||
3 5 5
|
||||
4 6 6
|
||||
];
|
||||
|
||||
evtFaultSpec=[...
|
||||
114, 0.00, 0, 0.02, 0;
|
||||
74, 0.00, 0, 0.02, 0;
|
||||
114, 0.00, 0, 0.02, 1;
|
||||
74, 0.00, 0, 0.02, 1;
|
||||
1674, 0.00, 0, 0.1, 0;
|
||||
1674, 0.00, 0, 0.1, 1;
|
||||
];
|
||||
```
|
||||
|
||||
Assume the settings file is `settings_polilsh_tsa.m` and the system data file is `d_dcase2383wp_mod2_ind_zip_syn.m`. We can run the TSA as follows:
|
||||
```Matlab
|
||||
res_2383_st=runPowerSAS('pf','d_dcase2383wp_mod2_ind_zip_syn.m'); % Run steady-state
|
||||
res_2383_tsa=runPowerSAS('dyn','d_dcase2383wp_mod2_ind_zip_syn.m',setOptions('hotStart',1),'settings_polilsh_tsa',res_2383_st.snapshot); % Hot start from existing steady-state
|
||||
|
||||
plotCurves(1,res_2383_tsa.t,res_2383_tsa.stateCurve,res_2383_tsa.SysDataBase,'v'); % plot the voltage magnitude curves
|
||||
```
|
||||
|
||||
### 2. Extended-term simulation using hybrid QSS and dynamic engines
|
||||
To accelerate computation — especially for extended-term simulation — PowerSAS.m provides an adaptive way to switch between QSS and dynamic engines in the course of a simulation. With this feature enabled, PowerSAS.m can switch to QSS simulation for better speed on detecting the fade-away of transients and switch back to dynamic simulation upon detecting transient events.
|
||||
|
||||
For more details on the technical approach, please refer to our paper:
|
||||
* Hybrid QSS and Dynamic Extended-Term Simulation Based on Holomorphic Embedding, arXiv:2104.02877
|
||||
|
||||
Example 2 illustrates the use of PowerSAS.m to perform extended-term simulation.
|
||||
|
||||
#### Example 2: Extended-term simulation
|
||||
We want to study the response of a 4-bus system under periodic disturbances. The entire simulated process is 500 seconds. Starting at 60 s and continuing until 270 s, the system undergoes events of adding/shedding loads every 30 s.
|
||||
|
||||
The key settings of the simulation are:
|
||||
```Matlab
|
||||
% settings_d_004_2a_agc.m
|
||||
|
||||
eventList=[...
|
||||
1 0.0000 0.0000 0 1 0.0 0.0100
|
||||
6 60.0000 0.0000 2 1 0.0 0.0100
|
||||
7 90.0000 0.0000 2 2 0.0 0.0100
|
||||
8 120.0000 0.0000 2 3 0.0 0.0100
|
||||
9 150.0000 0.0000 2 4 0.0 0.0100
|
||||
10 180.0000 0.0000 2 1 0.0 0.0100
|
||||
11 210.0000 0.0000 2 2 0.0 0.0100
|
||||
12 240.0000 0.0000 2 3 0.0 0.0100
|
||||
13 270.0000 0.0000 2 4 0.0 0.0100
|
||||
18 500.0000 0.0000 99 0 0.0 0.0100
|
||||
];
|
||||
|
||||
% Static load event data
|
||||
evtZip=[...
|
||||
1 1 1 1
|
||||
2 1 2 2
|
||||
3 1 3 3
|
||||
4 1 4 4
|
||||
];
|
||||
|
||||
evtZipSpec2=[...
|
||||
3 100.0000 100.0000 60.0000 0.0648 0.0648 0.0648 0.0359 0.0359 0.0359 0 1
|
||||
2 100.0000 100.0000 60.0000 0.0648 0.0648 0.0648 0.0359 0.0359 0.0359 0 1
|
||||
3 100.0000 100.0000 60.0000 -0.0648 -0.0648 -0.0648 -0.0359 -0.0359 -0.0359 0 1
|
||||
2 100.0000 100.0000 60.0000 -0.0648 -0.0648 -0.0648 -0.0359 -0.0359 -0.0359 0 1
|
||||
];
|
||||
```
|
||||
|
||||
First we run the simulation in full-dynamic mode and record time:
|
||||
```Matlab
|
||||
% Full dynamic simulation
|
||||
tagFullDynStart=tic;
|
||||
res_004_fulldyn=runPowerSAS('dyn','d_004_2a_bs_agc.m',[]],'settings_d_004_2a_agc');
|
||||
timeFullDyn=toc(tagFullDynStart);
|
||||
```
|
||||
|
||||
Then we run the simulation in hybrid QSS & dynamic mode and record time:
|
||||
```Matlab
|
||||
% Hybrid simulation with dynamic-QSS switching
|
||||
tagHybridStart=tic;
|
||||
res_004=runPowerSAS('dyn','d_004_2a_bs_agc.m',setOptions('allowSteadyDynSwitch',1),'settings_d_004_2a_agc');
|
||||
timeHybrid=toc(tagHybridStart);
|
||||
```
|
||||
|
||||
Compare the results:
|
||||
```Matlab
|
||||
plotCurves(1,res_004_fulldyn.t,res_004_fulldyn.stateCurve,res_004_fulldyn.SysDataBase,'v');
|
||||
plotCurves(2,res_004.t,res_004.stateCurve,res_004.SysDataBase,'v');
|
||||
```
|
||||
|
||||
And compare the computation time:
|
||||
```Matlab
|
||||
disp(['Full dynamic simulation computation time:', num2str(timeFullDyn),' s.']);
|
||||
disp(['Hybrid simulation computation time:', num2str(timeHybrid),' s.']);
|
||||
```
|
||||
|
||||
The complete example can be found in `/example/ex_extended_term_dyn.m`. And the results can also be found in our paper:
|
||||
* Hybrid QSS and Dynamic Extended-Term Simulation Based on Holomorphic Embedding, arXiv:2104.02877
|
||||
|
||||
|
||||
### Appendix: Variables in settings
|
||||
|
||||
#### variable `eventList`
|
||||
([back to top](#11-settings-file))
|
||||
##### Table 1. Definition of `eventList`
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Event index (can be an integer or a real number)
|
||||
2 | Event start time
|
||||
3 | Event end time (no effect for instant event)
|
||||
4 | Type of event (see [Table 2](#table-2-event-types))
|
||||
5 | Index of event under its type
|
||||
6 | Simulation method (default 0.0) (see below [Simulation methods](#simulation-methods))
|
||||
7 | Timestep (default 0.01)
|
||||
|
||||
##### Table 2. Event types
|
||||
([back to top](#11-settings-file))
|
||||
Value | Event type
|
||||
-------| -------------
|
||||
0 | Calculate steady-state at start
|
||||
1 | Add line
|
||||
2 | Add static load
|
||||
3 | Add induction motor load
|
||||
4 | Add synchronous generator
|
||||
6 | Applying/clearing faults
|
||||
7 | Cut line
|
||||
8 | Cut static load
|
||||
9 | Cut motor load
|
||||
10| Cut synchronous generator
|
||||
50| Dynamic process
|
||||
99| End of simulation
|
||||
|
||||
##### Simulation methods
|
||||
Simulation methods can be specified for each event on the 6th column of `eventList`. It is encoded as a number `x.yz`, where:
|
||||
* `x` is the method for solving differential equation, where 0 - SAS, 1 - Modified Euler, 2 - R-K 4, 3 - Trapezoidal rule.
|
||||
* `y` is the method for solving algebraic equation, where 0 - SAS, 1 - Newton-Raphson.
|
||||
* `z` is whether to use variable time step scheme for numerical integration (`x` is 1, 2 or 3). 0 - Fixed step, 1 - Variable step.
|
||||
|
||||
Note that when `x=0`, `y` and `z` are not effective, it automatically uses SAS and variable time steps.
|
||||
|
||||
#### variable `bsBus`
|
||||
([back to top](#11-settings-file))
|
||||
Current version only support one black start bus and therefore only the first line will be recognized. Will expand in the future versions.
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Bus index
|
||||
2 | Active power of Z component load
|
||||
3 | Active power of I component load
|
||||
4 | Active power of P component load
|
||||
5 | Reactive power of Z component load
|
||||
6 | Reactive power of I component load
|
||||
7 | Reactive power of P component load
|
||||
|
||||
#### variable `bsSyn`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Excitation potential
|
||||
3 | Active power
|
||||
4 | Participation factor for power balancing
|
||||
|
||||
#### variable `bsInd`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of induction motor
|
||||
2 | Mechanical load torque
|
||||
|
||||
#### variable `Efstd`
|
||||
([back to top](#11-settings-file))
|
||||
When there are synchronous generators in the system model, `Efstd` is needed to compute steady state. The `Efstd` is a column vector specifying the excitation potential of every synchronous generator, or it can also be a scalar assigning the excitation potentials of all the generator as the same value.
|
||||
|
||||
#### variables `evtLine` and `evtLineSpec`
|
||||
([back to top](#11-settings-file))
|
||||
In `eventList`, when the 4th column (event type) equals 1 or 7 (add or cut line, respectively), the index of the line events in `evtLine` corresponds to the 5th column of `eventList`.
|
||||
##### variable `evtLine`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of line events (from 5th column of `eventList`)
|
||||
2 | Start index in `evtLineSpec`
|
||||
3 | End index in `evtLineSpec`
|
||||
|
||||
##### variable `evtLineSpec`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of line
|
||||
2 | Add/cut mark, 0 - add line, 1 - cut line
|
||||
3 | Reserved
|
||||
4 | Reserved
|
||||
5 | Reserved
|
||||
|
||||
#### variables `evtZip`, `evtZipSpec` and `evtZipSpec2`
|
||||
([back to top](#11-settings-file))
|
||||
In `eventList`, when the 4th column (event type) equals 2 or 8 (add/cut static load), the index of the load events in `evtZip` corresponds to the 5th column of `eventList`.
|
||||
##### variable `evtLine`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of load events (from 5th column of `eventList`)
|
||||
2 | Choose `evtZipSpec` (0) or `evtZipSpec2` (1)
|
||||
3 | Start index in `evtZipSpec` or `evtZipSpec2`
|
||||
4 | End index in `evtZipSpec` or `evtZipSpec2`
|
||||
|
||||
##### variable `evtZipSpec`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of zip loads in system base state
|
||||
2 | Add/cut mark, 0 - add load, 1 - cut load
|
||||
|
||||
##### variable `evtZipSpec2` (recommended)
|
||||
([back to top](#11-settings-file))
|
||||
`evtZipSpec2` has the same format as PSAT ZIP load format, which represents the change of ZIP load. Whether the event is specified as add/cut load does not make difference.
|
||||
|
||||
#### variables `evtInd` and `evtIndSpec`
|
||||
([back to top](#11-settings-file))
|
||||
In `eventList`, when the 4th column (event type) equals 3 or 9 (add or cut induction motors, respectively), the index of the induction motor events in `evtInd` corresponds to the 5th column of `eventList`.
|
||||
##### variable `evtInd`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of induction motor events (from 5th column of `eventList`)
|
||||
2 | Start index in `evtIndSpec`
|
||||
3 | End index in `evtIndSpec`
|
||||
|
||||
##### variable `evtIndSpec`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of induction motor
|
||||
2 | Event type, 0 - add motor, 1 - change state, 2 - cut motor
|
||||
3 | Designated mechanical torque
|
||||
4 | Designated slip
|
||||
|
||||
#### variables `evtSyn` and `evtSynSpec`
|
||||
([back to top](#11-settings-file))
|
||||
In `eventList`, when the 4th column (event type) equals 4 or 10 (add or cut synchronous generators, respectively), the index of the synchronous generator events in `evtSyn` corresponds to the 5th column of `eventList`.
|
||||
##### variable `evtSyn`
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator events (from 5th column of `eventList`)
|
||||
2 | Start index in `evtSynSpec`
|
||||
3 | End index in `evtSynSpec`
|
||||
|
||||
##### variable `evtSynSpec`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Event type, 0 - add generator, 1 - cut generator
|
||||
3 | Designated rotor angle (only effective when adding generator, NaN means the rotor angle is the same with voltage angle).
|
||||
4 | Designated mechanical power (only effective when adding generator).
|
||||
5 | Designated excitation potential (only effective when adding generator).
|
||||
|
||||
#### variables `evtFault` and `evtFaultSpec`
|
||||
([back to top](#11-settings-file))
|
||||
In `eventList`, when the 4th column (event type) equals 6 (apply or clear faults, respectively), the index of the fault events in `evtFault` corresponds to the 5th column of `eventList`. In the current version, we only consider three-phase grounding faults.
|
||||
##### variable `evtFault`
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of fault events (from 5th column of `eventList`)
|
||||
2 | Start index in `evtFaultSpec`
|
||||
3 | End index in `evtFaultSpec`
|
||||
|
||||
##### variable `evtFaultSpec`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of fault line
|
||||
2 | Position of fault, 0.0 stands for starting terminal and 1.0 stands for ending terminal.
|
||||
3 | Resistance of fault.
|
||||
4 | Reactance of fault.
|
||||
5 | Event type: 0 - add fault; 1 - clear fault.
|
||||
|
||||
#### variable `evtDyn`
|
||||
([back to top](#11-settings-file))
|
||||
The `evtDyn` variable specifies the indexes of ramping events involving various types of components.
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of event
|
||||
2 | Start index in `evtDynPQ`
|
||||
3 | End index in `evtDynPQ`
|
||||
4 | Start index in `evtDynPV`
|
||||
5 | End index in `evtDynPV`
|
||||
6 | Start index in `evtDynInd`
|
||||
7 | End index in `evtDynInd`
|
||||
8 | Start index in `evtDynZip`
|
||||
9 | End index in `evtDynZip`
|
||||
10| Start index in `evtDynSh`
|
||||
11| End index in `evtDynSh`
|
||||
12| Start index in `evtDynZipRamp`
|
||||
13| End index in `evtDynZipRamp`
|
||||
14| Start index in `evtDynTmech`
|
||||
15| End index in `evtDynTmech`
|
||||
16| Start index in `evtDynPm`
|
||||
17| End index in `evtDynPm`
|
||||
18| Start index in `evtDynEf`
|
||||
19| End index in `evtDynEf`
|
||||
20| Start index in `evtDynVref`
|
||||
21| End index in `evtDynVref`
|
||||
22| Start index in `evtDynEq1`
|
||||
23| End index in `evtDynEq1`
|
||||
|
||||
#### variable `evtDynPQ`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of bus
|
||||
2 | Active power ramping rate
|
||||
3 | Reactive power ramping rate
|
||||
|
||||
#### variable `evtDynPV`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of bus
|
||||
2 | Active power ramping rate
|
||||
|
||||
#### variable `evtDynInd`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of induction motor
|
||||
2 | Mechanical load torque ramping rate
|
||||
|
||||
#### variable `evtDynZip`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of bus
|
||||
2 | ZIP load ramping rate
|
||||
|
||||
#### variable `evtDynSh`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of bus
|
||||
2 | Shunt admittance ramping rate
|
||||
|
||||
#### variable `evtDynZipRamp`
|
||||
([back to top](#11-settings-file))
|
||||
`evtDynZipRamp` has the same format as PSAT ZIP load format, which represents the ramping direction of ZIP load.
|
||||
|
||||
#### variable `evtDynTmech`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Ramping rate of mechanical power reference value (TG required)
|
||||
|
||||
#### variable `evtDynEf`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Ramping rate of excitation potential
|
||||
|
||||
#### variable `evtDynVref`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Ramping rate of exciter reference voltage
|
||||
|
||||
#### variable `evtDynEq1`
|
||||
([back to top](#11-settings-file))
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Index of synchronous generator
|
||||
2 | Ramping rate of transient excitation potential
|
||||
|
||||
141
doc/source/old/basic_usage.md
Normal file
@@ -0,0 +1,141 @@
|
||||
# Using PowerSAS.m: The Basics
|
||||
|
||||
### 1 Initialization before use
|
||||
To initialize PowerSAS.m, add the main directory of PowerSAS to Matlab or GNU Octave path, and execute command `initpowersas`. This will ensure all the functions of PowerSAS be added to the path and thus callable.
|
||||
|
||||
### 2 Call high-level API -- `runPowerSAS`
|
||||
Most grid analysis functionalities can be invoked through the high-level function `runPowerSAS`. `runPowerSAS` is defined as follows:
|
||||
```Matlab
|
||||
function res=runPowerSAS(simType,data,options,varargin)
|
||||
```
|
||||
##### Input arguments
|
||||
* `simType` is a string specifying the type of analysis, which can be one of the following values:
|
||||
* `'pf'`: Conventional power flow or extended power flow (for finding steady state of dynamic model).
|
||||
* `'cpf'`: Continuation power flow.
|
||||
* `'ctg'`: Contingency analysis (line outages).
|
||||
* `'n-1'`: N-1 line outage screening.
|
||||
* `'tsa'`: Transient stability analysis.
|
||||
* `'dyn'`: General dynamic simulation.
|
||||
* `data` is the system data to be analyzed. It can be either a string specifying the data file name, or a `SysData` struct. For more information about data format and `SysData` struct, please refer to the "Data format and models" chapter.
|
||||
* `options` specifies the options for analysis. If you do not provide `options` argument, or if you simply set the field to empty with `[]`, the corresponding routines will provide default options that will fit most cases. See Advanced Use chapter for more details.
|
||||
* `varargin` are the additional input variables depending on the type of analysis. Section 3 Basic analysis funtionalifies will explain more details.
|
||||
|
||||
##### Output
|
||||
Output `res` is a struct containing simulation result, system states, system data, etc.
|
||||
* `res.flag`: Flag information returned by the analysis task.
|
||||
* `res.msg`: More information as supplemental to the flag information.
|
||||
* `res.caseName`: The name of the analyzed case.
|
||||
* `res.timestamp`: A string showing the timestamp the analysis started, can be viewed as an unique identifier of the analysis task.
|
||||
* `res.stateCurve`: A matrix storing the evolution of system states, where the number of rows equals the number of state variables, and the number of columns equals the number of time points.
|
||||
* `res.t`: A vector storing time points corresponding to states in `res.stateCurve`.
|
||||
* `res.simSettings`: A struct specifying the simulation settings, including simulation parametersand defined events.
|
||||
* `res.eventList`: A matrix showing as the list of events in the system in the analysis task.
|
||||
* `res.SysDataBase`: A struct of system data at base state.
|
||||
* `res.snapshot`: The snapshot of the system states at the end of anlaysis, which can be used to initilize other analysis tasks.
|
||||
|
||||
To access the system states, we need to further access each kind of state variable in `res.stateCurve`. For example, the commands to extract the voltage from `res.stateCurve` are shown below:
|
||||
```Matlab
|
||||
[~,idxs]=getIndexDyn(res.SysDataBase); % Get the indexes of each kind of state variables
|
||||
vCurve=res.StateCurve(idxs.vIdx,:); % idxs.vIdx is the row indexes of voltage variables
|
||||
```
|
||||
|
||||
### 3 Basic analysis functionalities
|
||||
#### 3.1 Power flow analysis
|
||||
When `simType='pf'`, the `runPowerSAS` function runs power flow analysis. In addition to the conventional power flow model, `runPowerSAS` also integrates an extended power flow to solve the steady state of dynamic models. For example, it will calculate the rotor angles of synchronous generators and slips of induction motors in addition to the network equations.
|
||||
|
||||
To perform power flow analysis, call the `runPowerSAS` function as follows:
|
||||
```Matlab
|
||||
res=runPowerSAS('pf',data,options)
|
||||
```
|
||||
where the argument `data` can either be a string of file name or a `SysData` struct.
|
||||
|
||||
Below are some examples:
|
||||
|
||||
```Matlab
|
||||
% Use file name string to specify data
|
||||
res1=runPowerSAS('pf','d:/codes/d_003.m'); % Filename can use absolute path
|
||||
res2=runPowerSAS('pf','d_003.m'); % If data file is already in the Matlab/Octave path,
|
||||
% then can directly use file name
|
||||
res3=runPowerSAS('pf','d_003'); % Filename can be without '.m'
|
||||
res4=runPowerSAS('pf','d_003',setOptions('dataPath','d:/codes'); % Another way to specify data path
|
||||
|
||||
% Use SysData struct to specify data
|
||||
SysData=readDataFile('d_003.m','d:/codes'); % Generate SysData struct from data file
|
||||
res5=runPowerSAS('pf',SysData); % Run power flow using SysData struct
|
||||
```
|
||||
|
||||
#### 3.2 Continuation Power Flow
|
||||
Continuation power flow (CPF) analysis in PowerSAS.m features enhanced efficiency and convergence. To perform continuation power flow analysis, call `runPowerSAS` function as follows:
|
||||
```Matlab
|
||||
res=runPowerSAS('cpf',data,options,varargin)
|
||||
```
|
||||
where `options` (optional) specifies the options of CPF analysis, and `varargin` are the input arguments:
|
||||
* `varargin{1}` (optional) is the ramping direction of load, which is an $\text{N}\times \text{12}$ matrix, the first column is the index of the bus, and the columns 5-10 are the ZIP load increase directions.
|
||||
* `varargin{2}` (optional) is the ramping direction of generation power, which is an $\text{N}\times \text{2}$ matrix, the first column is the index of the bus, and the 2nd column is the generation increase directions.
|
||||
* `varargin{3}` (optional) is the snapshot of the starting state, with which the computation of starting steady state is skipped.
|
||||
|
||||
Some examples can be found in `example/ex_cpf.m`.
|
||||
|
||||
#### 3.3 Contingency Analysis
|
||||
Contingency analysis computes the system states immediately after removing a line/lines. To perform contingency analysis, call `runPowerSAS` as follows:
|
||||
```Matlab
|
||||
res=runPowerSAS('ctg',data,options,varargin)
|
||||
```
|
||||
where `options` (optional) specifies the options of contingency analysis. When not using customized options, set `options=[]`. And `varargin` are the input arguments:
|
||||
* `varargin{1}` (mandatory) is a vector specifying the indexes of lines to be removed simultaneously.
|
||||
* `varargin{2}` (optional) is the snapshot of the starting state. With this option, computing the starting steady state is skipped.
|
||||
|
||||
Some examples can be found in `example/ex_ctg.m`.
|
||||
|
||||
#### 3.4 N-1 screening
|
||||
N-1 screening is essentially performing a series of contingency analysis, each removing a line from the base state. To perform N-1 screening, call `runPowerSAS` as follows:
|
||||
```Matlab
|
||||
res=runPowerSAS('n-1',data,options)
|
||||
```
|
||||
|
||||
The return value `res` is a cell containing each contingency analysis results.
|
||||
|
||||
Some examples can be found in `example/ex_n_minus_1.m`.
|
||||
|
||||
#### 3.5 Transient Stability Analysis
|
||||
Transient stability anslysis (TSA) assesses the system dynamic behavior and stability after given disturbance(s). 3-phase balanced fault(s) are the most common disturbances in the TSA. In PowerSAS, the TSA supports the analysis of the combinations of multiple faults. To perform transient Stability Analysis, call `runPowerSAS` in the following way:
|
||||
```Matlab
|
||||
res=runPowerSAS('tsa',data,options,varargin)
|
||||
```
|
||||
where `options` (optional) specifies the options of TSA. When not using customized options, set `options=[]`. And `varargin` are the input arguments:
|
||||
* `varargin{1}` (mandatory) is a $\text{N}\times \text{6}$ matrix specifying the faults:
|
||||
* The 1st column is the index of line where the fault happens.
|
||||
* The 2nd column is the relative position of the fault, 0.0 stands for the starting terminal and 1.0 stands for the ending terminal. For example, 0.5 means the fault happens in the middle point of the line.
|
||||
* The 3rd and 4th columns are the resistance and reactance of the fault.
|
||||
* The 5th and 6th columns specify the fault occurrence and clearing times.
|
||||
* `varargin{2}` (optional) is the snapshot of the starting state, with which the computation of starting steady state is skipped.
|
||||
|
||||
By default, the TSA is run for 10 seconds. To change the simulation length, specify in the `options` argument, e.g. `options=setOptions('simlen',30)`.
|
||||
|
||||
Example can be found in `example/ex_tsa.m`.
|
||||
|
||||
### 4. Plot dynamic analysis results
|
||||
PowerSAS provides an integrated and formatted way of plotting the system behavior in the time domain. The function for plotting curves is `plotCurves`. The function is defined as follows:
|
||||
```Matlab
|
||||
function plotCurves(figId,t,stateCurve,SysDataBase,variable,...
|
||||
subIdx,lw,dot,fontSize,width,height,sizeRatio)
|
||||
```
|
||||
The argument list is explained as follows:
|
||||
* `figId`: A positive integer or `[]` specifying the index of figure.
|
||||
* `t`: A vector of time instants. If got `res` from `runPowreSAS` function, then input this argument as `res.t`.
|
||||
* `stateCurve`: A matrix of system states in time domain, the number of columns should equal to the length of `t`. If got `res` from `runPowreSAS` function, then input this argument as `res.stateCurve`.
|
||||
* `SysDataBase`: A SysData struct specifying the base system. If got `res` from `runPowreSAS` function, then input this argument as `res.SysDataBase`.
|
||||
* `variable`: A string of variable name to be plotted. Here is a nonexhaustive list:
|
||||
* `'v'`: voltage magnitude (pu);
|
||||
* `'a'`: voltage angle (rad);
|
||||
* `'delta'`: rotor angle of synchronous generators;
|
||||
* `'omega'`: deviation of synchronous generator rotor speed;
|
||||
* `'s'`: induction motor slips;
|
||||
* `'f'`: frequency;
|
||||
* `subIdx`: Allows you to pick a portion of the variables to plot e.g., the voltage of some selected buses. Default value is `[]`, which means that all the selected type of variables are plotted.
|
||||
* `lw`: Line width. Default value is 1.
|
||||
* `dot`: Allows you to choose whether to show data points. 1 means curves mark data dots, and 0 means no data dots are shown on curves. The default value is 0.
|
||||
* `fontSize`: Font size of labels. Default value is 12.
|
||||
* `width`: Width of figure window in pixels.
|
||||
* `height`: Height of figure window in pixels.
|
||||
* `sizeRatio`: If `width` or `height` is not specified, the size of the figure is determined by the `sizeRatio` of the screen size. The default value of `sizeRatio` is 0.7.
|
||||
13
doc/source/old/data_and_models.md
Normal file
@@ -0,0 +1,13 @@
|
||||
# Data and Models
|
||||
### 1. Supported data formats
|
||||
Currently PowerSAS.m supports extended PSAT (Matlab) data format. Support for other formats and data format conversion features will be added in future versions.
|
||||
|
||||
### 2. Extension of PSAT (Matlab) format
|
||||
#### 2.1 Automatic generation control (AGC) model
|
||||
Here PowerSAS provides a simple AGC model. It is named as `Agc.con` in data files and it is a $\text{N}\times \text{4}$ matrix. Each column is defined as below:
|
||||
Column | Content
|
||||
-------| -------------
|
||||
1 | Bus index
|
||||
2 | Reciprocal of turbine governor gain on bus
|
||||
3 | Effective damping ratio on bus
|
||||
4 | Reciprocal of AGC control time constant
|
||||
BIN
doc/source/old/img/accuracy_039_1.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 235 KiB |
BIN
doc/source/old/img/accuracy_039_2.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 168 KiB |
BIN
doc/source/old/img/comp_speed_458.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 175 KiB |
BIN
doc/source/old/img/comp_time_039.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 11 KiB |
BIN
doc/source/old/img/contingency_458.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 199 KiB |
BIN
doc/source/old/img/ssa_benchmarking.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 263 KiB |
12
doc/source/old/index.md
Normal file
@@ -0,0 +1,12 @@
|
||||
# PowerSAS.m
|
||||
|
||||
**PowerSAS.m** is a robust, efficient and scalable power grid analysis framework based on semi-analytical solutions (SAS) technology. The **PowerSAS.m** is the version for MATLAB/Octave users. It currently provides the following functionalities (more coming soon!):
|
||||
|
||||
* **Steady-state analysis**, including power flow (PF), continuation power flow (CPF), contingency analysis.
|
||||
* **Dynamic security analysis**, including voltage stability analysis, transient stability analysis, and flexible user-defined simulation.
|
||||
* **Hybrid extended-term simulation** provides adaptive QSS-dynamic hybrid simulation in extended term with high accuracy and efficiency.
|
||||
|
||||
### Key features
|
||||
* **High numerical robustness.** Backed by the SAS approach, the PowerSAS tool provides much better convergence than the tools using traditional Newton-type algebraic equation solvers when solving algebraic equations (AE)/ordinary differential equations (ODE)/differential-algebraic equations(DAE).
|
||||
* **Enhanced computational performance.** Due to the analytical nature, PowerSAS provides model-adaptive high-accuracy approximation, which brings significantly extended effective range and much larger steps for steady-state/dynamic analysis. PowerSAS has been used to solve large-scale system cases with 200,000+ buses.
|
||||
* **Customizable and extensible.** PowerSAS supports flexible customization of grid analysis scenarios, including complex event sequences in extended simulation term.
|
||||
22
doc/source/old/installation.md
Normal file
@@ -0,0 +1,22 @@
|
||||
# Installation
|
||||
|
||||
### 1. System requirements
|
||||
Matlab (7.1 or later) or GNU Octave (4.0.0 or later).
|
||||
|
||||
### 2. Installation
|
||||
* Extract source code to a directory.
|
||||
* Enter the directory in Matlab or GNU Octave.
|
||||
* Execute command `setup`. You will see the following sub-directories:
|
||||
* `/data`: Stores test system data, simulation settings data, etc.
|
||||
* `/example`: Some examples of using PowerSAS.m.
|
||||
* `/output`: Stores test result data.
|
||||
* `/internal`: Internal functions of PowerSAS.m computation core.
|
||||
* `/util`: Auxiliary functions including data I/O, plotting, data conversion, etc.
|
||||
* `/logging`: Built-in logging system.
|
||||
* `/doc`: Documentation.
|
||||
|
||||
### 3. Test
|
||||
* Execute command `initpowersas` to initialize the environment, then execute `test_powersas` to run tests. You should expect all tests to pass.
|
||||
|
||||
### 4. Initialization
|
||||
To initialize PowerSAS.m, add the main directory of PowerSAS.m to your Matlab or GNU Octave path and run the command `initpowersas`. This will ensure that all the functions of PowerSAS.m are added to the path and thus callable.
|
||||
61
doc/source/old/sas_basics.md
Normal file
@@ -0,0 +1,61 @@
|
||||
# SAS and PowerSAS.m: The Story
|
||||
|
||||
### 1. What are Semi-Analysical Solutions (SAS)?
|
||||
Semi-analytical solutions (SAS) is a family of computational methods that uses certain analytical formulations (e.g., power series, fraction of power series, continued fractions) to approximate the solutions of mathematical problems. In terms of formulation, they are quite different from the commonly used numerical approaches e.g., Newton-Raphson method for solving algebraic equations, Runge-Kutta and Trapezoidal methods for solving differential equations. The parameters of SAS still need to be determined through some (easier and more robustness-guaranteed) numerical computation, and thus these methods are called semi-analytical.
|
||||
|
||||
### 2. What are the advantages of SAS?
|
||||
|
||||
In power system modeling and analysis, SAS has been proven to have the following features:
|
||||
|
||||
* **High numerical robustness.** Steady-state analysis usually requires solving nonlinear algebraic equations. Traditional tools usually use Newton-Raphson method or its variants, whose results can be highly dependent on the selection of starting point and they suffer from non-convergence problem. In contrast, SAS provides much better convergence thanks to the high-level analytical nature.
|
||||
|
||||
* **Enhanced computational performance.** In dynamic analysis, the traditional numerical integration approaches are essentially lower-order methods, which are confined to small time steps to avoid too-rapid error accumulation. These tiny time steps severely restrict the computation speed. In contrast, SAS provides high-order approximation, enabling much larger effective time steps and faster computation speed.
|
||||
|
||||
* **More accurate event-driven simulation.** For complex system simulation, it is common to simulate discrete events. Traditional numerical integration methods only provide solution values on discrete time steps and thus may incur substantial errors predicting events. In contrast, SAS provides an analytical form of solution as a continuous function, and thus can significantly reduce event prediction errors.
|
||||
|
||||
### 3. How is the performance of PowerSAS.m?
|
||||
#### 3.1 Benchmarking with traditional methods on Matlab
|
||||
PowerSAS.m shows advantages in both computational robustness and efficiency over the traditional approaches.
|
||||
|
||||
On **steady-state analysis**, we have done several benchmarking with traditional methods. For example, we test the steady-state contingency analysis on PowerSAS.m and Newton-Raphson (NR) method and its variants on Matlab. The test is performed on a reduced Eastern-Interconnection (EI) system and we tested on 30,000 contingency scenarios. The results suggest that the traditional methods have about 1% chance of failing to deliver correct results, while SAS has delivered all the correct results.
|
||||
|
||||
For more details, please refer to our recent paper:
|
||||
|
||||
* Rui Yao, Feng Qiu, Kai Sun, “Contingency Analysis Based on Partitioned and Parallel Holomorphic Embedding”, IEEE Transactions on Power Systems, in press.
|
||||
|
||||
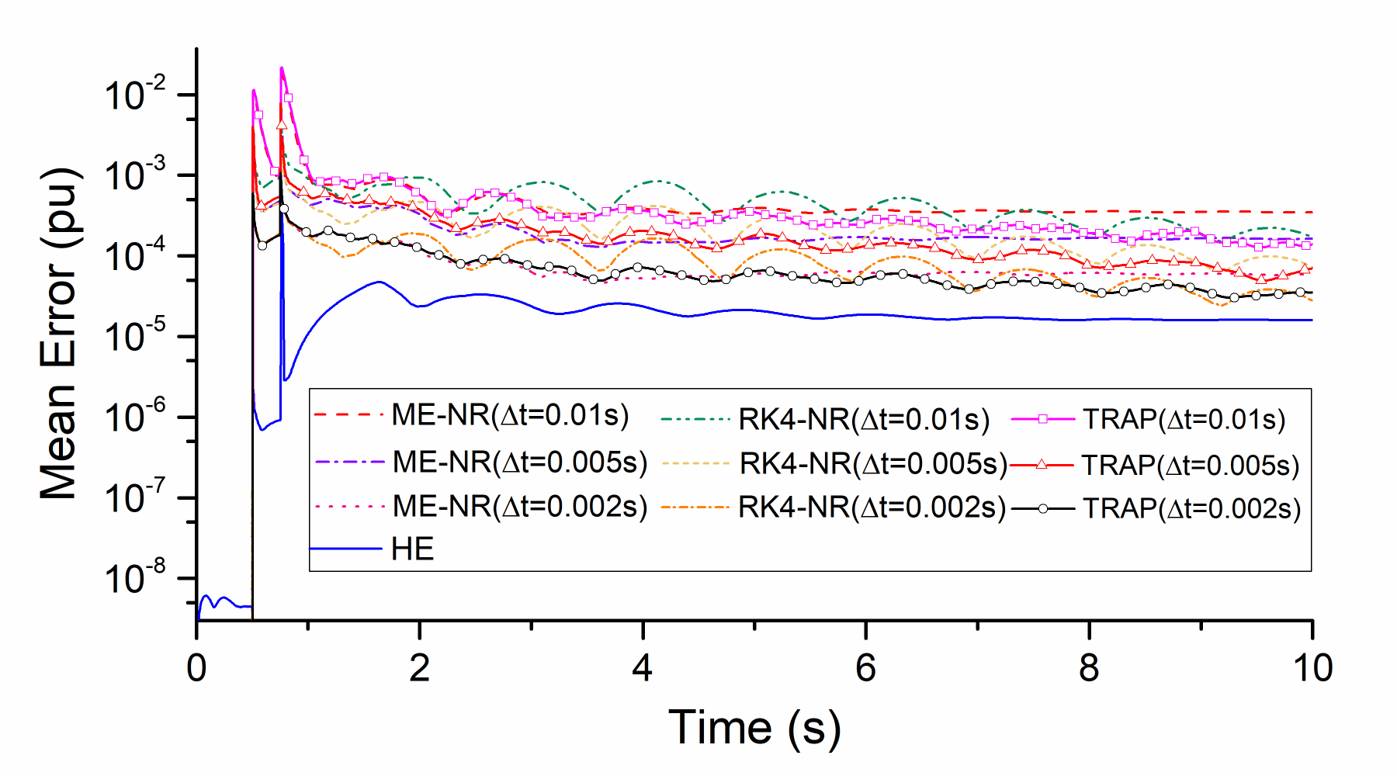
On **dynamic analysis**, we have compared with serveral most commonly used traditional numerical approaches for solving ODE/DAEs, including modified Euler, Runge-Kutta, and trapezoidal methods. Tests of transient-stability analysis on IEEE 39-bus system model and large-scale mdodified Polish 2383-bus system model have verified that SAS has significant advantages over the traditional methods in both accuracy and efficiency.
|
||||
|
||||
**Accuracy comparison on IEEE 39-bus system (1) -- Comparison with fixed-time-step traditional methods**
|
||||
|
||||
|
||||
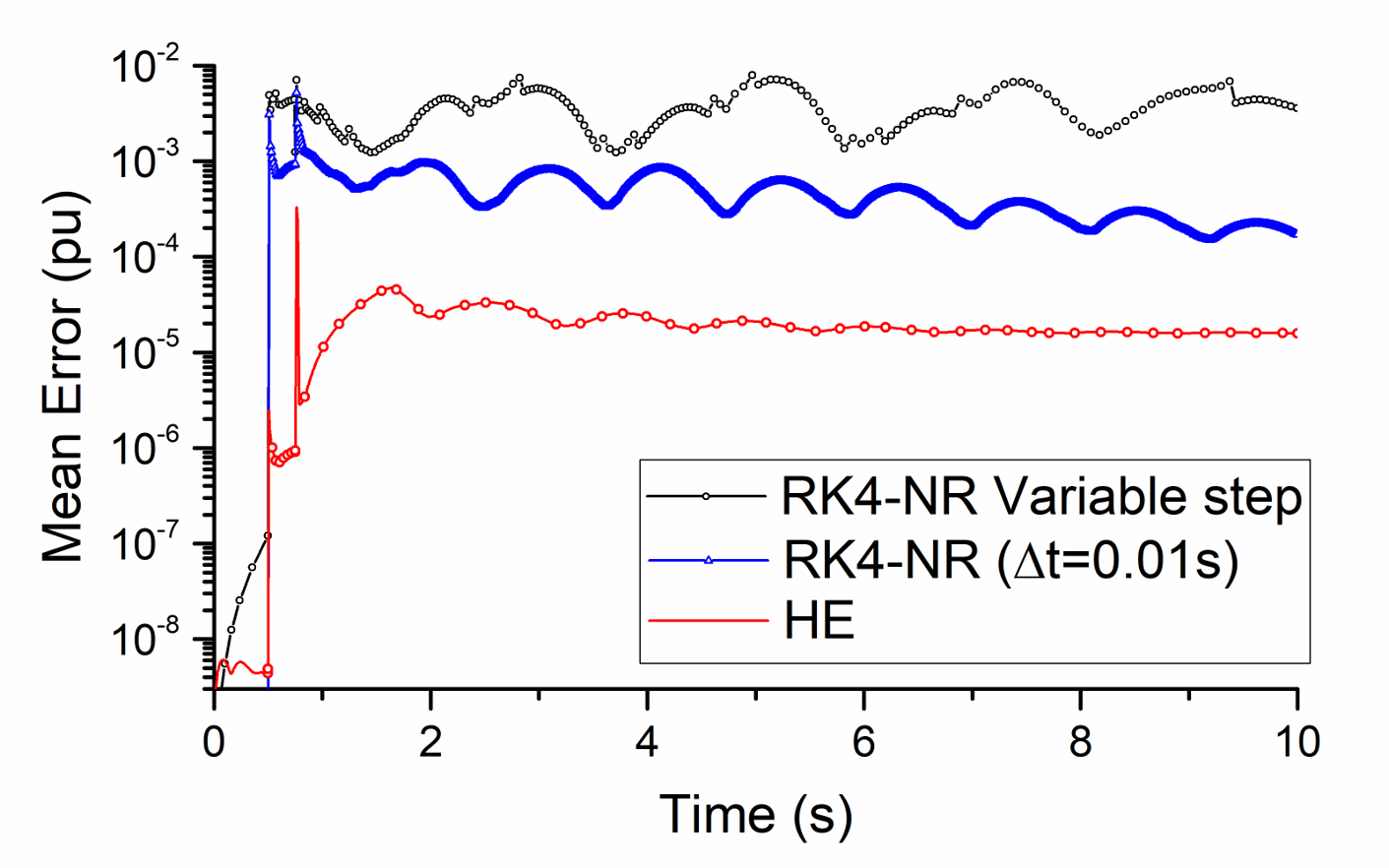
**Accuracy comparison on IEEE 39-bus system (2) -- Comparison with variable-time-step traditional method**
|
||||
|
||||
|
||||
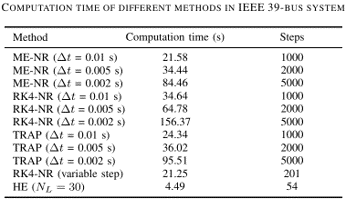
**Computation time comparison on IEEE 39-bus system**
|
||||
|
||||
|
||||
|
||||
For more details, please refer to our recent paper:
|
||||
|
||||
* Rui Yao, Yang Liu, Kai Sun, Feng Qiu, Jianhui Wang,"Efficient and Robust Dynamic Simulation of Power Systems with Holomorphic Embedding", IEEE Transactions on Power Systems, 35 (2), 938 - 949, 2020.
|
||||
|
||||
#### 3.2 Benchmarking with PSS/E
|
||||
##### 3.2.1 Static Security Region (SSR)
|
||||
Static Security Region (SSR) is an important decision-support tool showing region of stable operating points. However, there are often challenges on convergence when computing SSRs, especially near the boundaries. So SSR can be used for benchmarking the numerical robustness of computational methods.
|
||||
|
||||
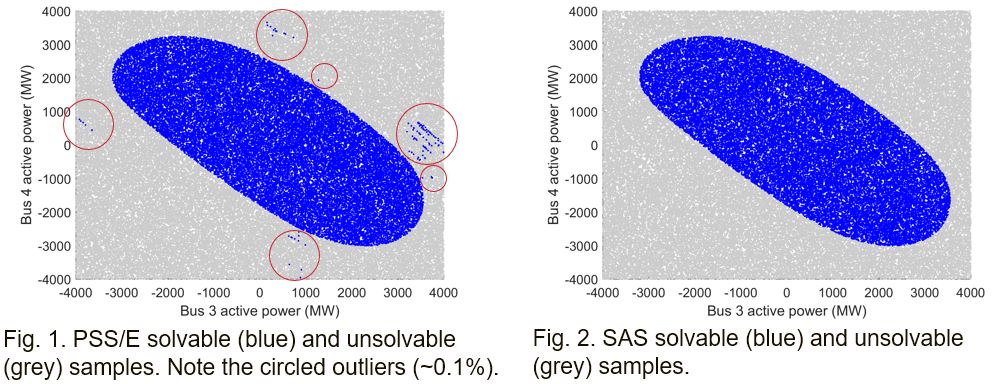
We test SSR on IEEE 39-bus system by varying active power of buses 3&4. The active power of buses 3&4 are sampled uniformly over the interval of [-4000, 4000] MW. The figure below shows the SSR derived by PSS/E and PowerSAS.m. It shows that PSS/E result have some irregular outliers (about 0.1% of the samples) outside of the SSR and actually are not correct solutions of power flow equations. In contrast, PowerSAS.m correctly identifies the SSR.
|
||||
|
||||
|
||||
|
||||
|
||||
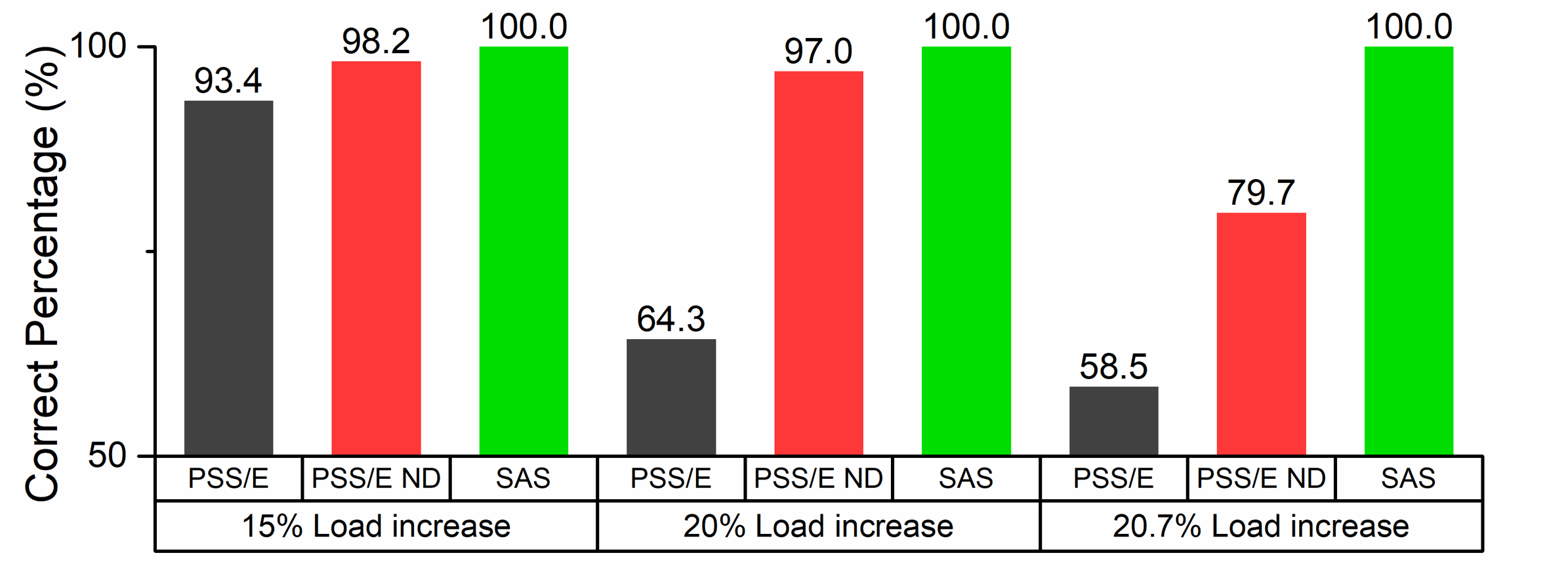
##### 3.2.2 N-k Contingency analysis
|
||||
Contingency ananlysis also has convergence challenges due to large disturbances. Here we perform benchmarking between PSS/E (with and without non-divergence options) and PowerSAS.m on the N-25 contingency analysis on a reduced eastern-interconnection (EI) system with 458 buses. We increase the load & generation level by 15%, 20%, and 20.7%, respectively, as 3 different loading scenarios (loading margin is 20.791%). In each scenario, we randomly choose 5000 N-25 contingency samples.
|
||||
|
||||
|
||||
|
||||
|
||||
The figure shows the percentage of correct results using different tools. It can be seen that PSS/E has some chance to deliver incorrect results, and the chance increases with loading level. In contrast, PowerSAS.m still returns results all correctly.
|
||||
|
||||
We also compared the computation speeds of PowerSAS.m and PSS/E. The figure below shows the average contingency analysis computation time of on the 458-bus system. The results show that SAS’s speed is comparable to and even faster than PSS/E’s.
|
||||
|
||||

|
||||
21
doc/source/release-notes.rst
Normal file
@@ -0,0 +1,21 @@
|
||||
.. _ReleaseNotes:
|
||||
|
||||
=============
|
||||
Release notes
|
||||
=============
|
||||
|
||||
The APIs before v3.0.0 are in beta and may change without prior notice.
|
||||
|
||||
Pre-v1.0.0
|
||||
==========
|
||||
|
||||
v0.5 (2023-02-17)
|
||||
-------------------
|
||||
|
||||
- Base System setup
|
||||
- Development preparation
|
||||
|
||||
v0.4 (2023-01)
|
||||
-------------------
|
||||
|
||||
This release outlines the package.
|
||||